Output Ports
Point cloud feature
Parameters
Point Cloud Properties
Specifies the type of the x and y components. When an integer type is specified, the component values will be ascending integers (e.g. 0, 1, 2, ...), and the component will have a scale and offset value specified by other parameters (e.g. Average Spacing Along X and X Lower Left Coordinate). When a floating point type is specified, the component values will be multiplied out (e.g. min, min + 1*spacing, min + 2*spacing, etc.).
This parameter specifies how to create the points in the point cloud: either by using origin and size parameters, or extents parameters.
The parameters specify the origin for the lower-left corner of the feature as a whole.
These parameters define the width and height of the point cloud, in ground units.
These parameters specify how many points per ground unit should be in the output point cloud.
These parameters specify the origin for the upper-right corner of the feature as a whole.
The rotation angle is measured in degrees counterclockwise from horizontal, and measures the rotation of the primary axis from horizontal.
Z Values
This parameter specifies how the points in the cloud are given Z values. The Z values will be assigned as follows:
- Flat: Every point in the cloud will have a z value specified by the minimum z.
- Sloped: The points will have z values between minimum and maximum arranged in a gradient throughout the point cloud.
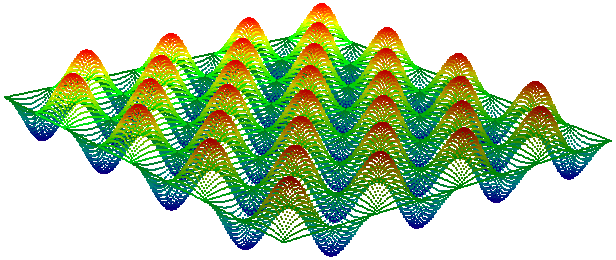
- Trigonometric: The points will have z values between minimum and maximum arranged in a trigonometric pattern through the point cloud. Note that this pattern requires that z be a floating point type.
- None: The point cloud will not have a z component.
Specifies the type of the z component.
These parameters specify the minimum and maximum z value in the cloud.
Component Values
If the Value Pattern is:
- Single Value: the component will have a value specified by its minimum
- Checkered Pattern: the component will have values arranged in a gradient throughout the point cloud
- Checkerboard: the component will have values alternating between its min/max
Note: The point cloud must contain at least 8 rows and 8 columns in order for Checkered Pattern or Checkerboard to be used. Smaller point clouds will always be filled with a single value.
Specifies each component to generate, the type of that component, and the minimum and maximum values for the component.
Example Output
Editing Transformer Parameters
Using a set of menu options, transformer parameters can be assigned by referencing other elements in the workspace. More advanced functions, such as an advanced editor and an arithmetic editor, are also available in some transformers. To access a menu of these options, click  beside the applicable parameter. For more information, see Transformer Parameter Menu Options.
beside the applicable parameter. For more information, see Transformer Parameter Menu Options.
Transformer Categories
Search FME Knowledge Center
Search for samples and information about this transformer on the FME Knowledge Center.
Tags Keywords: point "point cloud" cloud PointCloud coerce LiDAR split creator create sonar