FME Transformers: 2024.1
Categories
Point Clouds
Related Transformers
PointCloudCombiner
PointCloudFilter
PointCloudMerger
PointCloudSorter
Typical Uses
- Separating a point cloud into subsets based on component values or value ranges
- Isolating points in a point cloud based on component values, value ranges, or first/last returns
How does it work?
The PointCloudSplitter receives point cloud features and divides them into individual point clouds, based on either unique component values or ranges of values.
The split may be performed on any numeric component, with two Split Types available:
- Unique: All unique values that exist for the selected component will be automatically identified, and one point cloud output for each value. Optionally, specific Unique Values to Keep may be chosen and only those component values will generate output features.
- Range: Ranges of values are specified, and one point cloud is output for each range. Ranges may be generated. At least one range must be specified. Any points that fall outside of all specified ranges are assigned a default value.
The transformer also has Split By First Return Only and Last Return Only options, which keep only the first and last returns, respectively, and discard all other points. Split By Color operates on ranges of RGB values.
In all cases, an Output Attribute may be added to the output features, identifying the split value.
Examples
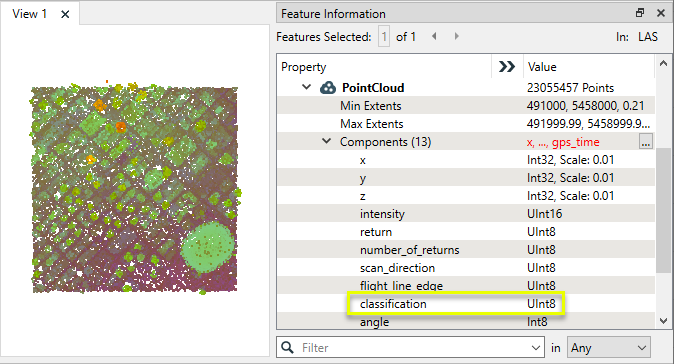
In this example, we will divide a point cloud into parts, based on its classification component values. Note that the input point cloud does have a classification component, but we do not know what exact values may exist in the feature.
The point cloud is routed into a PointCloudSplitter.
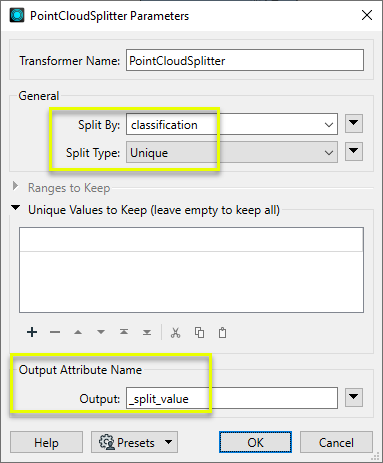
In the parameters dialog, Split By is set to classification, and the Split Type is Unique. We keep the default Output attribute name of _split_value.
Note that Unique Values to Keep is empty - and so all values will be output.
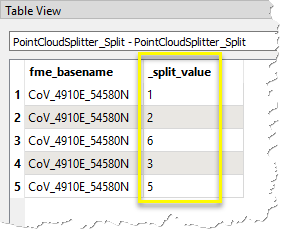
Five features are output, indicating the five unique values were found for classification in the input point cloud. Examining the Split output in the FME Data Inspector’s table view, we can see those values assigned to the _split_value attribute.
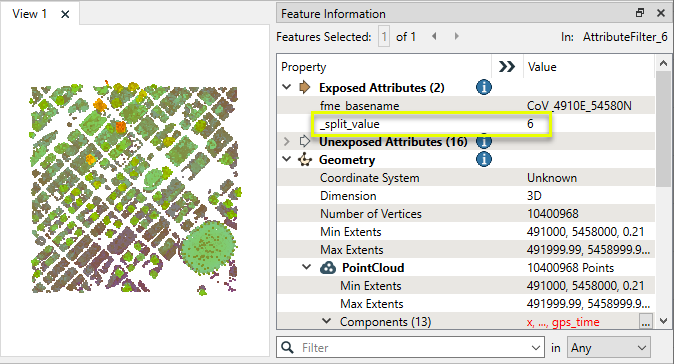
To examine one of these features, we further route them through an AttributeFilter, filtering on _split_value, and looking only for value 6 (buildings).
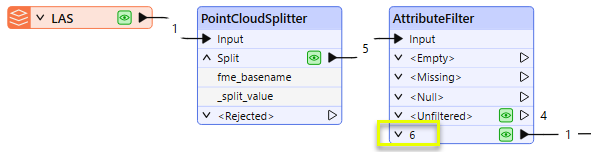
This output point cloud contains all points from the original that had a classification value of 6, indicated by its _split_value attribute.
Usage Notes
- The PointCloudFilter provides similar functionality. It can split point clouds with more complex expressions, and provides multiple output ports, one per filter criteria. However, it does not split on automatic identification of unique values or perform simple first/last return filtering, as the PointCloudSplitter does.
Choosing a Point Cloud Transformer
FME has a selection of transformers for working specifically with point cloud data.
For information on point cloud geometry and properties, see Point Clouds (IFMEPointCloud).
|
Combines features into a single point cloud. Point cloud and non-point cloud geometries are supported. |
|
|
Adds new components with constant values to a point cloud. |
|
|
Copies selected component values onto either a new or existing component |
|
|
Keeps only specified point cloud components, discarding all others. |
|
|
Removes specified components from a point cloud. |
|
|
Renames an existing component. |
|
|
Alters the data type of point cloud components, and converts component values if required. |
|
|
Reads point cloud features for testing purposes, including any accumulated point cloud operations. No additional operations are performed, and nothing is done with the features. |
|
|
Creates a point cloud of specified size and density, with default component values. |
|
|
Evaluates expressions on each point in a point cloud feature, including algebraic operations and conditional statements, and sets individual point cloud component values. |
|
|
Serializes the geometry of a point cloud feature into a Blob attribute, encoding the contents according to a choice of common binary point cloud formats. |
|
|
Separates point clouds into multiple features, based on evaluating expressions including component values, and creates a separate output port for each expression defined. |
|
|
Merges point clouds by joining points where selected component values match (join key), including x, y, z, and other components. Component values are transferred between point clouds and output is filtered based on matching success and duplication. |
|
|
Sets point cloud component values by overlaying a point cloud on a raster. The component values for each point are interpolated from band values at the point location. |
|
|
Extracts the geometry properties of a point cloud feature and exposes them as attributes, optionally checking for their existence, retrieving component properties, and finding minimum and maximum values. Extents may also be recalculated and updated. |
|
|
Decodes a binary attribute containing encoded point clouds stored as Blobs, replacing the feature’s geometry with the decoded point cloud. |
|
|
Reduces the number of points in a point cloud by selectively keeping points based on the shape of the point cloud. The simplified and removed points are output as two discrete point clouds. |
|
|
Sorts the points within a point cloud by one or more component values. |
|
|
Separates point clouds into multiple features based on component values, color, or first/last return. |
|
|
Calculates statistics on point cloud components and adds the results as attributes. |
|
|
Takes an input point cloud and reconstructs it into an output mesh. |
|
|
Reduces the number of points in (thins) a point cloud by keeping points at a fixed interval, a maximum number of points, or a set quantity of first or last points. Remaining points are discarded. |
|
|
Converts point clouds to point or multipoint geometries, optionally retaining attribute and component values. |
|
|
Applies a point cloud’s scale, offset, or transformation matrix to it, recalculating component values and removing the transformation values. |
Configuration
Input Ports
This transformer accepts only point cloud features.
Output Ports
One or more point cloud features as specified in the parameters.
Non-point cloud features will be routed to the <Rejected> port, as well as invalid point clouds.
Rejected features will have an fme_rejection_code attribute with one of the following values:
INVALID_GEOMETRY_TYPE
INVALID_FEATURE_COMPONENTS
MISSING_FEATURE_COMPONENTS
Rejected Feature Handling: can be set to either terminate the translation or continue running when it encounters a rejected feature. This setting is available both as a default FME option and as a workspace parameter.
Parameters
|
Split By |
Specify the component(s) on which the point cloud will be separated. This may be any single component name, or one of the following special values:
Single components may be split using either Split Type Range or Unique. |
||||||||||
|
Split Type |
Select the type of component value specification:
|
When Split Type is Range, this table specifies the ranges to produce output point clouds.
One feature will be output for each range specified, as long as at least one point falls within it. If ranges overlap, points will only be allocated to the first range they match (in table order).
Points that do not match any specified range are output as a single point cloud, with the Default Output Value assigned.
|
From |
The start value for the range that you are classifying. This field accepts numbers only and must be less than the corresponding To value.
|
|
To |
The end value for the range that you are classifying. This field accepts numbers only and must be greater than the corresponding From value.
|
|
Output Value |
The value assigned to the Output Attribute for each range. Values may be numbers or strings. Default: One point cloud will be output for points that do not match any range. This Default Output Value is assigned to the Output Attribute for this output feature. |
When Split Type is Unique, this table optionally specifies which values should produce output features.
|
Unique Values to Keep |
Optional: Enter specific values to produce output point cloud features. All non-matching points will be discarded. Limiting a splitting operation to only desired values may improve performance. If blank, all unique values will be identified and each will produce a new output feature. |
|
Output |
Name an attribute to be added to all output point clouds, which will identify the value that created it.
|
Editing Transformer Parameters
Transformer parameters can be set by directly entering values, using expressions, or referencing other elements in the workspace such as attribute values or user parameters. Various editors and context menus are available to assist. To see what is available, click  beside the applicable parameter.
beside the applicable parameter.
Defining Values
There are several ways to define a value for use in a Transformer. The simplest is to simply type in a value or string, which can include functions of various types such as attribute references, math and string functions, and workspace parameters.
Using the Text Editor
The Text Editor provides a convenient way to construct text strings (including regular expressions) from various data sources, such as attributes, parameters, and constants, where the result is used directly inside a parameter.
Using the Arithmetic Editor
The Arithmetic Editor provides a convenient way to construct math expressions from various data sources, such as attributes, parameters, and feature functions, where the result is used directly inside a parameter.
Conditional Values
Set values depending on one or more test conditions that either pass or fail.
Parameter Condition Definition Dialog
Content
Expressions and strings can include a number of functions, characters, parameters, and more.
When setting values - whether entered directly in a parameter or constructed using one of the editors - strings and expressions containing String, Math, Date/Time or FME Feature Functions will have those functions evaluated. Therefore, the names of these functions (in the form @<function_name>) should not be used as literal string values.
| These functions manipulate and format strings. | |
|
Special Characters |
A set of control characters is available in the Text Editor. |
| Math functions are available in both editors. | |
| Date/Time Functions | Date and time functions are available in the Text Editor. |
| These operators are available in the Arithmetic Editor. | |
| These return primarily feature-specific values. | |
| FME and workspace-specific parameters may be used. | |
| Creating and Modifying User Parameters | Create your own editable parameters. |
Table Tools
Transformers with table-style parameters have additional tools for populating and manipulating values.
|
Row Reordering
|
Enabled once you have clicked on a row item. Choices include:
|
|
Cut, Copy, and Paste
|
Enabled once you have clicked on a row item. Choices include:
Cut, copy, and paste may be used within a transformer, or between transformers. |
|
Filter
|
Start typing a string, and the matrix will only display rows matching those characters. Searches all columns. This only affects the display of attributes within the transformer - it does not alter which attributes are output. |
|
Import
|
Import populates the table with a set of new attributes read from a dataset. Specific application varies between transformers. |
|
Reset/Refresh
|
Generally resets the table to its initial state, and may provide additional options to remove invalid entries. Behavior varies between transformers. |





Note: Not all tools are available in all transformers.
For more information, see Transformer Parameter Menu Options.
Reference
|
Processing Behavior |
|
|
Feature Holding |
No |
| Dependencies | None |
| Aliases | |
| History |
FME Community
The FME Community is the place for demos, how-tos, articles, FAQs, and more. Get answers to your questions, learn from other users, and suggest, vote, and comment on new features.
Search for all results about the PointCloudSplitter on the FME Community.
Examples may contain information licensed under the Open Government Licence – Vancouver, Open Government Licence - British Columbia, and/or Open Government Licence – Canada.
Keywords: point "point cloud" cloud PointCloud LiDAR sonar