FME Transformers: 2026.2
Related Transformers
AreaOnAreaOverlayer
Bufferer
Clipper
LineOnAreaOverlayer
LineOnLineOverlayer
NeighborFinder
PointOnAreaOverlayer
PointOnLineOverlayer
PointOnPointOverlayer
SpatialFilter
SpatialRelator
TopologyBuilder
Computes intersections between all input features, breaking lines and polygons wherever an intersection occurs and creating nodes at those locations.
Typical Uses
- Identifying intersections within a dataset
- Reducing geometry to line segments
- Intersecting linear features at junctions to create clean topology
- Cutting overshoots at their intersection
- Creating points (nodes) at intersections to find likely features
How does it work?
The Intersector takes all input features and compares them to each other. Features are split wherever there is an intersection. Split features receive attributes from intersecting features (a spatial join), and the number of overlaps encountered and segments created is counted.
Intersected segments are output, as well as nodes (point features) placed at the location of each intersection. Overlapping segments are reduced to one segment before being output.
Optionally, a list attribute can be created which will retain attributes for multiple matches.
Aggregates can either be deaggregated before processing or rejected.
Examples
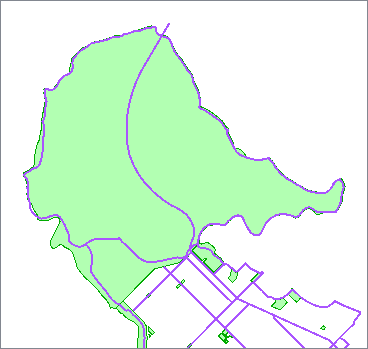
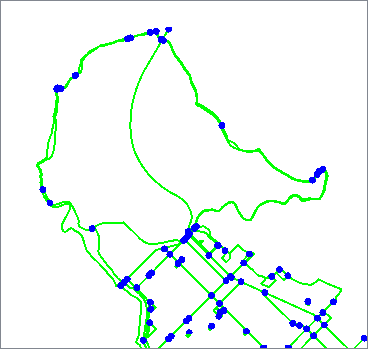
In this example, we start with a set of park polygons and bike path lines, and want to split the polygons where the lines intersect them. To do that, we will first use the Intersector, then build the segmented areas.
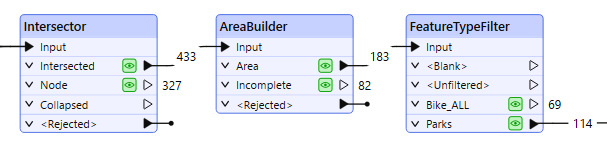
The first step is to route both datasets into one Intersector.
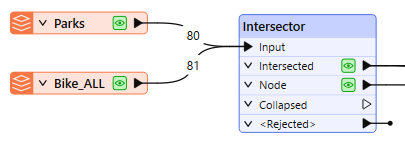
The default settings will produce the results we want.
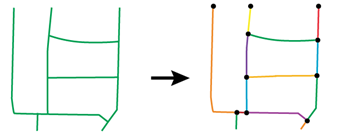
The Intersector reduces all of the geometry to line segments, and creates nodes at the intersection points.
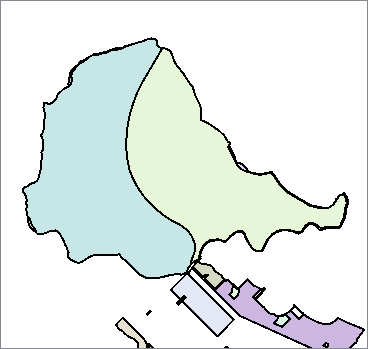
By routing only the Intersected features through an AreaBuilder and then filtering for Parks only, we end up with park polygons, split where the bike paths ran through them.
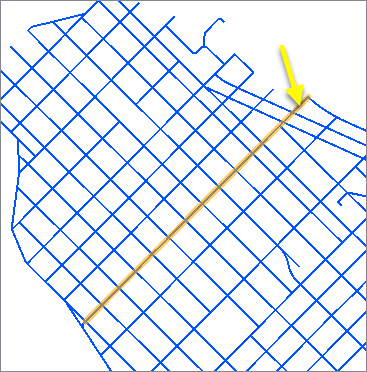
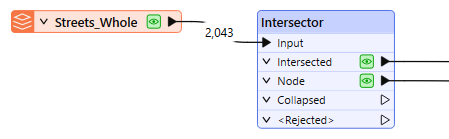
In this example, we start with a dataset of street centerlines. The street geometry is as contiguous as possible - the line segments are not broken at intersections, as shown here with a selected street highlighted in yellow. We want to create intersections, and find out which streets cross at those intersections, using a list attribute.
The street dataset set is routed into an Intersector.
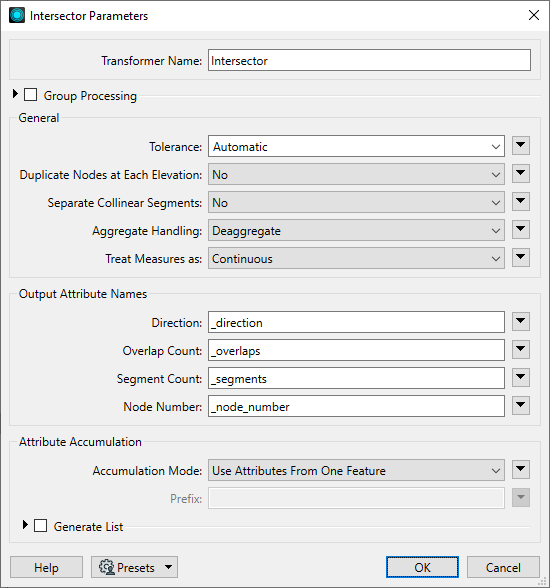
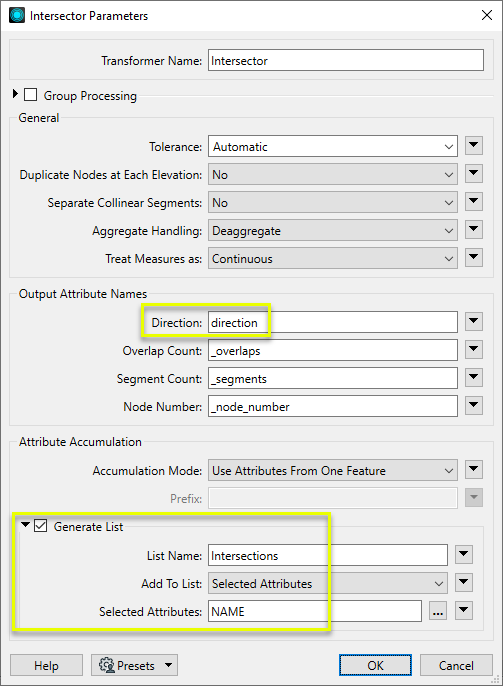
In the Intersector parameters dialog, Generate List is enabled. The list is named Intersections, and one selected attribute - NAME - will be captured in the new list.
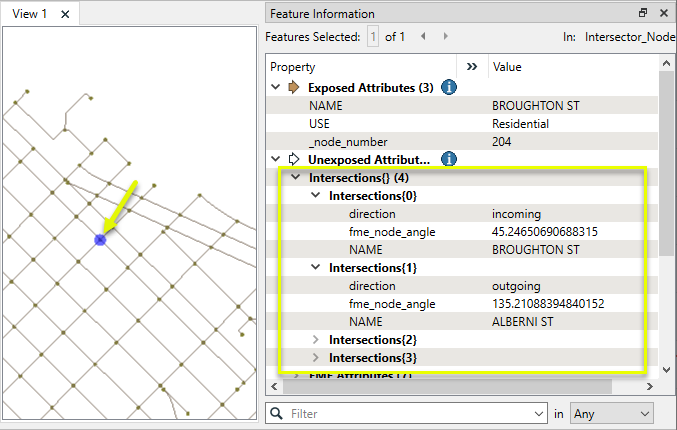
At each intersection of the lines, they are split, and a node is placed at the intersection. The nodes have a list called Intersections, which contains the NAME attribute we requested, as well as the angle and direction of line it is referring to.
The selected node shown here has four items in the list, as four line segments converge at that point - Broughton St incoming and outgoing, and Alberni St incoming and outgoing.
The lists can be further manipulated - see About List Attributes.
Usage Notes
Choosing a Spatial Transformer
Many transformers can assess spatial relationships and perform spatial joins - analyzing topology, merging attributes, and sometimes modifying geometry. Generally, choosing the one that is most specific to the task you need to accomplish will provide the optimal performance results. If there is more than one way to do it (which is frequently the case), time spent on performance testing alternate methods may be worthwhile.
To correctly analyze spatial relationships, all features should be in the same coordinate system. The Reprojector may be useful for reprojecting features within the workspace.
|
Transformer |
Can Merge Attributes |
Alters Geometry |
Counts Related Features |
Creates List |
Supported Types* |
Recommended For |
|---|---|---|---|---|---|---|
| SpatialFilter | Yes | No | No | No |
|
|
| SpatialRelator | Yes | No | Yes | Yes |
|
|
| AreaOnAreaOverlayer | Yes | Yes | Yes | Yes |
|
|
| LineOnAreaOverlayer | Yes | Yes | Yes | Yes |
|
|
| LineOnLineOverlayer | Yes | Yes | Yes | Yes |
|
|
| PointOnAreaOverlayer | Yes | No | Yes | Yes |
|
|
| PointOnLineOverlayer | Yes | Yes | Yes | Yes |
|
|
| PointOnPointOverlayer | Yes | No | Yes | Yes |
|
|
| Intersector | Yes | Yes | Yes | Yes |
|
|
| Clipper | Yes | Yes | No | No |
|
|
| NeighborFinder | Yes | In some cases | No | Yes |
|
|
| TopologyBuilder | Yes | Yes | No | Yes |
|
|
* Note that Curve includes Lines, Arcs, and Paths. Area includes Polygons, Donuts, and Ellipses.
Spatial analysis can be processing-intensive, particularly when a large number of features are involved. If you would like to tune the performance of your workspace, this is a good place to start.
When there are multiple ways to configure a workspace to reach the same goal, it is often best to choose the transformer most specifically suited to your task.
If performance is an issue in your workspace, look for alternative methods, guided by geometry.
Configuration
Input Ports
Features to be compared for intersections. Point, line, and area features are supported.
Output Ports
The intersected features are output to this port. If the List Name parameter was specified, these features will have an attribute containing their number of overlapping input features. They will also have all attributes of the original features.
The locations of topologically significant nodes are represented by point features and are output to this port. The transformer parameters modify which attributes are included on the output features.
Features which were smaller than the tolerance value collapse to a point and are output to this port.
All null, surface, solid, raster, and point cloud features are output through this port.
Features whose projection onto the xy-plane are not finite (i.e. nan or infinity coordinates) are also output from this port.
Rejected Feature Handling: can be set to either terminate the translation or continue running when it encounters a rejected feature. This setting is available both as a default FME option and as a workspace parameter.
Parameters
|
Group By |
The default behavior is to use the entire set of features as the group. This option allows you to select attributes that define which groups to form. |
||||
|
Complete Groups |
Select the point in processing at which groups are processed:
There are two typical reasons for using When Group Changes (Advanced) . The first is incoming data that is intended to be processed in groups (and is already so ordered). In this case, the structure dictates Group By usage - not performance considerations. The second possible reason is potential performance gains. Performance gains are most likely when the data is already sorted (or read using a SQL ORDER BY statement) since less work is required of FME. If the data needs ordering, it can be sorted in the workspace (though the added processing overhead may negate any gains). Sorting becomes more difficult according to the number of data streams. Multiple streams of data could be almost impossible to sort into the correct order, since all features matching a Group By value need to arrive before any features (of any feature type or dataset) belonging to the next group. In this case, using Group By with When All Features Received may be the equivalent and simpler approach. Note Multiple feature types and features from multiple datasets will not generally naturally occur in the correct order.
As with many scenarios, testing different approaches in your workspace with your data is the only definitive way to identify performance gains. |
|
Tolerance |
The minimum distance between geometries in 2D before they are considered equal, in ground units. If the tolerance is Automatic, a tolerance will be automatically computed based on the location of the input geometries. Additionally, a custom tolerance may be used. |
|
Duplicate Nodes at Each Elevation |
The creation of nodes can be calculated in 3D, if requested. Constructing nodes in 3D would mean that line segments would only share a node if they shared the same Z value at the point they intersected. Constructing nodes in 2D would mean that all intersecting segments would share a common node, regardless of their respective Z values. For example, a situation where two lines (that crossed) represented roads, where one road was an overpass above the other road. with differing elevations. If you constructed nodes in 3D, these two roads would not be linked to the same node where they crossed. Two nodes would be produced at the crossing point – each one with a different Z value. If you constructed nodes in 2D, these lines would both link to a common node, which would be present at the location where they crossed. In either the 2D or 3D case, the full dimensionality of the input is preserved in the output – 3D features are never converted to 2D. The 2D or 3D choice only indicates how the nodes are created and which lines are linked to them; it does not affect the dimension of the features that are output. Yes - Whenever 3D lines intersect at differing heights, two 2D nodes will be output via the Node port. Each node will have the same x and y coordinates, but a different node number. No - Whenever 3D lines intersect at differing heights, a single 2D node is output at the intersection point. |
|
Separate Collinear Segments |
If Yes - causes overlapping segments not to be merged into a single segment: one copy is output for each original feature sharing the segment. Each such segment will have the respective original feature’s attributes as its main attributes, and attributes from all other collinear features will be added as a list attribute, if the list name was supplied. When a coverage of polygons is input, the set of topologically significant lines which form their boundaries is output. |
|
Aggregate Handling |
Deaggregate: All input aggregates will be deaggregated, and each split part will be processed independently. With this setting, the transformer might output more features than were given as inputs. Reject: All input aggregates will be rejected. |
|
Treat Measures as |
When new coordinates are added due to intersection, the measures at those coordinates are determined from existing coordinates. Continuous: New measures will be computed from a linear interpolation of the neighboring coordinates along that segment. Discrete: Measures will be set to the measures of the nearest coordinates along the intersected segment. |
|
Direction
|
Name this optional attribute to include in generated lists. On segment features, it indicates whether the attributes at that entry in the list come from a collinear feature that had the "same" or "opposite" direction as the output feature. On node features, it indicates whether the attributes at that entry in the list come from a segment feature that is "outgoing" from the node or "incoming" to the node. |
|
Overlap Count |
Name the attribute to contain the number of collinear input lines that overlapped the output segment. |
|
Segment Count |
Name the attribute to contain the number of segments into which the segment’s original feature was divided. If an input feature was broken into n output segments, each of those segments will have an attribute named <attribute name> which has a value of n. |
|
Node Number |
Name the attribute to contain a unique ID for each topologically significant node. |
|
Accumulation Mode |
Specifies how attributes should be accumulated. Drop Attributes: All incoming attributes are removed from the features. Merge Attributes: Merges all attributes from overlapping segments. Use Attributes From One Feature: Takes all attributes from one representative feature. |
|
Prefix |
When Separate Collinear Segments is Yes, and Accumulation Mode is Merge Attributes, this value prefixes all incoming attributes on collinear segments. It does not affect node (point) output. |
Generate List
When enabled, adds a list attribute to the output features, and the attributes of intersecting features are added to the list. Nodes will receive list attributes from all intersecting features, including direction and angle.
|
List Name |
Enter a name for the list attribute. Note List attributes are not accessible from the output schema in FME Workbench until they are exposed with an AttributeExposer or processed with a transformer that operates on them, such as a ListExploder or ListConcatenator.
|
|
Add To List |
All Attributes: All attributes will be added to the output features. Selected Attributes: Enables the Selected Attributes parameter, where specific attributes may be chosen for inclusion. |
|
Selected Attributes |
Enabled when Add To List is set to Selected Attributes. Specify the attributes you wish to be included. |
Editing Transformer Parameters
Transformer parameters can be set by directly entering values, using expressions, or referencing other elements in the workspace such as attribute values or user parameters. Various editors and context menus are available to assist. To see what is available, click  beside the applicable parameter.
beside the applicable parameter.
Defining Values
There are several ways to define a value for use in a Transformer. The simplest is to simply type in a value or string, which can include functions of various types such as attribute references, math and string functions, and workspace parameters.
Using the Text Editor
The Text Editor provides a convenient way to construct text strings (including regular expressions) from various data sources, such as attributes, parameters, and constants, where the result is used directly inside a parameter.
Using the Arithmetic Editor
The Arithmetic Editor provides a convenient way to construct math expressions from various data sources, such as attributes, parameters, and feature functions, where the result is used directly inside a parameter.
Conditional Values
Set values depending on one or more test conditions that either pass or fail.
Parameter Condition Definition Dialog
Content
Expressions and strings can include a number of functions, characters, parameters, and more.
When setting values - whether entered directly in a parameter or constructed using one of the editors - strings and expressions containing String, Math, Date/Time or FME Feature Functions will have those functions evaluated. Therefore, the names of these functions (in the form @<function_name>) should not be used as literal string values.
| These functions manipulate and format strings. | |
|
Special Characters |
A set of control characters is available in the Text Editor. |
| Math functions are available in both editors. | |
| Date/Time Functions | Date and time functions are available in the Text Editor. |
| These operators are available in the Arithmetic Editor. | |
| These return primarily feature-specific values. | |
| FME and workspace-specific parameters may be used. | |
| Creating and Modifying User Parameters | Create your own editable parameters. |
Table Tools
Transformers with table-style parameters have additional tools for populating and manipulating values.
|
Row Reordering
|
Enabled once you have clicked on a row item. Choices include:
|
|
Cut, Copy, and Paste
|
Enabled once you have clicked on a row item. Choices include:
Cut, copy, and paste may be used within a transformer, or between transformers. |
|
Filter
|
Start typing a string, and the matrix will only display rows matching those characters. Searches all columns. This only affects the display of attributes within the transformer - it does not alter which attributes are output. |
|
Import
|
Import populates the table with a set of new attributes read from a dataset. Specific application varies between transformers. |
|
Reset/Refresh
|
Generally resets the table to its initial state, and may provide additional options to remove invalid entries. Behavior varies between transformers. |





Note: Not all tools are available in all transformers.
For more information, see Transformer Parameter Menu Options.
Reference
|
Processing Behavior |
|
|
Feature Holding |
Yes |
| Dependencies | |
| Aliases | |
| History |
FME Online Resources
The FME Community and Support Center Knowledge Base have a wealth of information, including active forums with 35,000+ members and thousands of articles.
Search for all results about the Intersector on the FME Community.
Examples may contain information licensed under the Open Government Licence – Vancouver, Open Government Licence - British Columbia, and/or Open Government Licence – Canada.